 قطعات مکانیک
قطعات مکانیک کوپل
کوپل بوش و واشر
بوش و واشر








این موتور با ولتاژ ۱۲ ولت در حالت بهینه کار می کند.
در صورتی که ولتاژ کمتر از ۱۲ ولت استفاده کنید دور خروجی و توان و نهایتا گشتاور تولیدی موتور کاهش می یابد .
در صورتی که برای این موتور از ولتاژهای بیشتری استفاده کنید ممکن است به دورها و یا گشتاورهای بالاتر دسترسی یابید ولی مطمئنا عمر موتور بسیار کوتاه تر شده و سریعتر از بین می رود.
وجود گیربکس بر سر راه موتور باعث شده که بتوان به گشتاور بیشتری دست پیدا کرد .
با توجه به اینکه چرخ دنده های فلزی با یکدیگر درگیر هستند روغن کاری چرخ دنده هم از سر و صدای گیربکس می کاهد و هم اینکه روانتر کار می کند.
ولتاژ ورودی موتور به صورت DC است . موتور دارای ۲ پین ورودی است که کنار یکی از پین ها رنگ قرمز قرار دارد که پایه + و دیگری پایه – است .
با وصل کردن ولتاژ به پایه ها موتور در جهت عقربه های ساعت می چرخد . در صورتی که جای + و – ورودی پایه ها را عوض کنید جهت چرخش موتور تغییر می کند.
به همین راحتی می توانید جهت چرخش ربات خود را تغییر دهید و یا رباتتان به راحتی دور بزند .
در صورتی که از دورهای بالاتر موتورها استفاده کنید ربات شما با سرعت بیشتر حرکت می کند و قدرت کمتر .
در صورتی که از موتور دور پایین استفاده کنید ربات شما با سرعت کمتر و با قدرت بیشتری حرکت می کند .
البته موارد دیگری نیز در این امر اهمیت دارد مثل چرخ ربات شما برای انتخاب موتور حتما به ولتاژ و گشتاور و دور موتور دقت کنید.
این موتور برای ربات سریع مناسب است .
این موتور از گیربکس خوبی برخوردار است و موتور آن در آزمایشات تا 30 ولت نیز به خوبی عمل کرده است.
این موتور گیربکس با ولتاژ 12 ولت در حالت بهینه کار میکند . در صورتیکه ولتاژ کمتر از 12 ولت استفاده کنید دور خروجی و توان و نهایتا گشتاور تولیدی موتور کاهش میابد . از طرفی در صورتیکه برای این موتور از ولتاژهای بیشتری استفاده کنید ممکن است به دورها و یا گشتاورهای بالاتر دسترسی یابید ولی مطمئنا عمر موتور بسیار کوتاه تر شده و سریعتر از بین میرود.
وجود گیربکس بر سر راه موتور باعث شده که بتوان به گشتاور بیشتری دست پیدا کرد . با توجه به اینکه چرخدنده های فلزی با یکدیگر درگیر هستند روغن کاری چرخدنده هم از سرو صدای گیربکس میکاهد و هم اینکه روانتر کار میکند.
ولتاژ ورودی موتور بصورت DC است . موتور دارای 2 پین ورودی است که کنار یکی از پینها رنگ قرمز قرار دارد که پایه + و دیگری پایه – است . با وصل کردن ولتاژ به پایه ها موتور در جهت عقربه های ساعت میچرخد . در صورتیکه جای + و – ورودی پایه ها را عوض کنید جهت چرخش موتور تغییر میکند.
به همین راحتی میتوانید جهت چرخش روبات خود را تغییر دهید و یا روباتتان براحتی دور بزند .
در صورتیکه از دورهای بالاتر موتورها استفاده کنید ربات شما با سرعت بیشتر حرکت میکند و قدرت کمتر و در صورتیکه از موتور دور پایین استفاده کنید ربات شما با سرعت کمتر وبا قدرت بیشتری حرکت میکند . البته موارد دیگری نیز در این امر اهمیت دارد مثل چرخ ربات شما برای انتخاب موتور حتما به ولتاژ و گشتاور و دور موتور دقت کنید.
مشخصات:
توضیحات موتور
| مدل | ZGA28RP |
| کشور سازنده | چین |
| ولتاژ (V) | 12 |
| جریان در حالت بی باری (A) | 0.04 |
| حداکثر گشتاور (kg.cm) | 0.22 |
| گشتاور پایدار (kg.cm) | 0.22 |
| دور خروجی (RPM) | 320 |
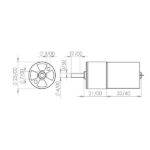
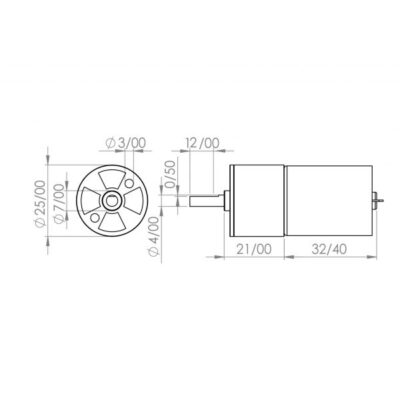
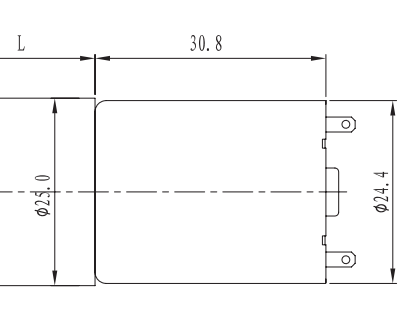
| قطر شافت (mm) | 4 |
| طول شافت (mm) | 12 |
| طول (mm) | 54 |
| قطر (mm) | 28 |
جنس: فلزی(تکنولوژی آلمان)
قطر :28 میلیمتر
طول شفت: ۱۲ میلیمتر
قطر شفت :۴ میلیمتر
تعداد دور با ولتاژ نامی ۱۲ ولت : 320 دور در دقیقه










 محصولات قطعه شناسی
محصولات قطعه شناسی محصولات آموزشی کودک
محصولات آموزشی کودک پک های آموزشی پرمصرف
پک های آموزشی پرمصرف باتری های قابل شارژ VEXiran
باتری های قابل شارژ VEXiran کتاب های آموزش رباتیک
کتاب های آموزش رباتیک محصولات VEX رباتیک
محصولات VEX رباتیک موتورها
موتورها دسته کنترل و جانبی ها
دسته کنترل و جانبی ها
Reviews
There are no reviews yet.